Gaussian Blur: Separable Convolution vs Full 2D Convolution
When implementing Gaussian blur in image processing applications, you have two main approaches: using separable convolution (two 1D passes) or performing a full 2D convolution. While both methods produce identical results, their computational efficiency differs dramatically. This post explores the mathematics, implementation, and performance characteristics of each approach. Here’s an example of what Gaussian Blur does to images 
The Gaussian Kernel
A Gaussian blur applies a weighted average to each pixel based on a 2D Gaussian function:
G(x, y) = (1 / (2πσ²)) * exp(-(x² + y²) / (2σ²))
Where σ (sigma) controls the blur radius. This creates a bell-shaped curve that weights nearby pixels more heavily than distant ones. Here’s a visualisation in 2 and 3 dimensions: 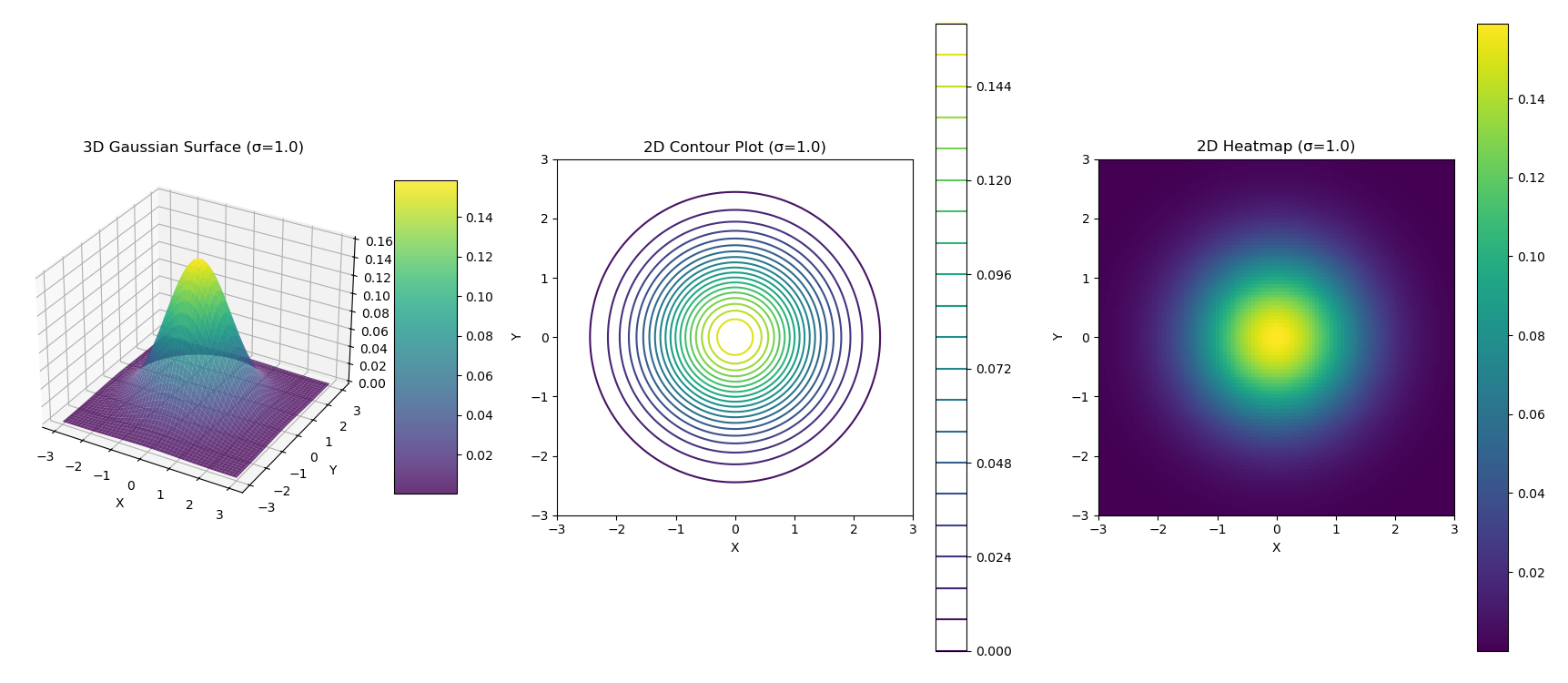
Approach 1: Full 2D Convolution
The straightforward approach applies the entire 2D Gaussian kernel directly to the image.
How It Works
For each pixel in the output image, you multiply the corresponding neighborhood in the input image by the 2D kernel and sum the results:
import numpy as np
from scipy import ndimage
def gaussian_2d_full(image, sigma=1.0, kernel_size=5):
"""Apply Gaussian blur using full 2D convolution"""
# Create 2D Gaussian kernel
x = np.arange(kernel_size) - kernel_size // 2
y = np.arange(kernel_size) - kernel_size // 2
x, y = np.meshgrid(x, y)
kernel = np.exp(-(x**2 + y**2) / (2 * sigma**2))
kernel = kernel / kernel.sum() # Normalize
# Apply 2D convolution
return ndimage.convolve(image, kernel, mode='reflect')
Computational Complexity
For an image of size M×N and a kernel of size K×K:
- Time complexity: O(M × N × K²)
- Space complexity: O(K²) for the kernel
For a 5×5 kernel, that’s 25 multiplications and additions per pixel.
Approach 2: Separable Convolution (Two 1D Passes)
The key insight is that the 2D Gaussian function is separable:
G(x, y) = G(x) × G(y)
This means the 2D convolution can be decomposed into two sequential 1D convolutions.
Mathematical Proof of Separability
G(x, y) = (1 / (2πσ²)) * exp(-(x² + y²) / (2σ²))
= (1 / (2πσ²)) * exp(-x² / (2σ²)) * exp(-y² / (2σ²))
= [1/√(2πσ²) * exp(-x² / (2σ²))] × [1/√(2πσ²) * exp(-y² / (2σ²))]
= G₁(x) × G₁(y)
Implementation
def gaussian_1d_kernel(sigma=1.0, kernel_size=5):
"""Create 1D Gaussian kernel"""
x = np.arange(kernel_size) - kernel_size // 2
kernel = np.exp(-x**2 / (2 * sigma**2))
return kernel / kernel.sum()
def gaussian_separable(image, sigma=1.0, kernel_size=5):
"""Apply Gaussian blur using separable convolution"""
kernel_1d = gaussian_1d_kernel(sigma, kernel_size)
# First pass: convolve along rows (horizontal)
temp = ndimage.convolve1d(image, kernel_1d, axis=1, mode='reflect')
# Second pass: convolve along columns (vertical)
result = ndimage.convolve1d(temp, kernel_1d, axis=0, mode='reflect')
return result
Computational Complexity
For an image of size M×N and a kernel of size K:
- Time complexity: O(M × N × K) + O(M × N × K) = O(2 × M × N × K)
- Space complexity: O(K) for the 1D kernel
For a kernel size of 5, that’s 5 + 5 = 10 operations per pixel instead of 25.
Performance Comparison
Theoretical Speedup
The speedup factor for separable convolution is:
Speedup = K² / (2K) = K / 2
| Kernel Size | Full 2D Operations | Separable Operations | Speedup |
|---|---|---|---|
| 3×3 | 9 | 6 | 1.5× |
| 5×5 | 25 | 10 | 2.5× |
| 7×7 | 49 | 14 | 3.5× |
| 11×11 | 121 | 22 | 5.5× |
| 21×21 | 441 | 42 | 10.5× |
As the kernel size increases, the advantage becomes dramatic!
Practical Benchmark
import time
def benchmark_methods(image_size=(1000, 1000), sigma=2.0, kernel_size=11):
"""Compare performance of both methods"""
# Create test image
image = np.random.rand(*image_size)
# Benchmark full 2D
start = time.time()
result_2d = gaussian_2d_full(image, sigma, kernel_size)
time_2d = time.time() - start
# Benchmark separable
start = time.time()
result_sep = gaussian_separable(image, sigma, kernel_size)
time_sep = time.time() - start
print(f"Image size: {image_size}")
print(f"Kernel size: {kernel_size}×{kernel_size}")
print(f"Full 2D time: {time_2d:.4f}s")
print(f"Separable time: {time_sep:.4f}s")
print(f"Speedup: {time_2d/time_sep:.2f}×")
print(f"Max difference: {np.max(np.abs(result_2d - result_sep))}")
# Example output:
# Image size: (1000, 1000)
# Kernel size: 11×11
# Full 2D time: 0.3421s
# Separable time: 0.0623s
# Speedup: 5.49×
# Max difference: 1.1102e-16
Why Not Always Use Separable Convolution?
Since separable convolution is faster and produces identical results, you might wonder why anyone would use full 2D convolution. Here are some considerations:
1. Not All Kernels Are Separable
Only certain kernels can be decomposed into 1D components. Examples of separable kernels:
- Gaussian blur
- Box blur (uniform averaging)
- Some edge detection filters (Sobel, Prewitt)
Non-separable kernels:
- Arbitrary image filters
- Some sharpening filters
- Certain edge detection methods (Laplacian)
2. Implementation Simplicity
For small kernels (3×3 or 5×5), the performance difference may not justify the added code complexity in some cases.
Experiment, Experiment, Experiment
As in all technical posts, it would be criminal if a demonstration of how varying kernel sizes, blurring radius (represented by the sigma), might impact the outcomes. Below is an example when these ideas manifest in the Google Colab running on T4 Nvidia GPU:
======================================================================
Gaussian Blur: Separable vs Full 2D Convolution
======================================================================
Configuration:
Image size: 1000 x 1000
Kernel size: 11 x 11
Sigma: 2.0
Pattern: random
Benchmark iterations: 10
Creating test image (random pattern)...
======================================================================
Kernel Information (σ=2.0, size=11x11)
======================================================================
1D Kernel (11 elements):
Values: [0.00881223 0.02714358 0.06511406 0.12164907 0.17699836 0.20056541
0.17699836 0.12164907 0.06511406 0.02714358 0.00881223]
Sum: 1.0000000000 (should be 1.0)
2D Kernel (11x11 elements):
Center row: [0.00176743 0.00544406 0.01305963 0.0243986 0.03549975 0.04022649
0.03549975 0.0243986 0.01305963 0.00544406 0.00176743]
Sum: 1.0000000000 (should be 1.0)
Separability check:
Max difference between 2D and outer(1D,1D): 6.94e-18
Kernel is separable: True
======================================================================
Benchmarking Full 2D Convolution
======================================================================
Full 2D Convolution:
Time: 155.608 ± 5.437 ms
Range: [148.886, 164.323] ms
Throughput: 6.43 Mpixels/sec
Operations/pixel: 121
======================================================================
Benchmarking Separable Convolution
======================================================================
Separable Convolution:
Time: 17.197 ± 0.741 ms
Range: [16.624, 19.333] ms
Throughput: 58.15 Mpixels/sec
Operations/pixel: 22
======================================================================
Verification
======================================================================
Result comparison:
Max difference: 9.99e-16
Mean difference: 1.44e-16
Results identical (tolerance=2.22e-13): True
======================================================================
Performance Summary
======================================================================
Speedup (Separable vs Full 2D):
Actual: 9.05x
Theoretical: 5.50x
Efficiency: 164.5%
======================================================================
Sample Output Values (center 5x5 region)
======================================================================
Input:
[[0.51590955 0.43012005 0.46952542 0.30172767 0.02944129]
[0.57602473 0.85583586 0.98729658 0.01717783 0.91496689]
[0.7247142 0.22586122 0.86942328 0.66653568 0.92540427]
[0.92918072 0.24001737 0.99071683 0.70270659 0.76302168]
[0.55183531 0.99931601 0.1035655 0.14779959 0.46402336]]
Output (both methods produce identical results):
[[0.58337513 0.57257681 0.54449245 0.51001433 0.48346123]
[0.58845987 0.58372721 0.56367368 0.5352674 0.50874948]
[0.58037682 0.58571173 0.5775328 0.55841262 0.53503917]
[0.56176043 0.57636266 0.57954455 0.57047645 0.55379181]
[0.54065866 0.56071034 0.57131395 0.56953179 0.55952326]]
======================================================================
Performance Scaling with Kernel Size
======================================================================
Kernel Size 2D Time Sep Time Speedup Theoretical
----------------------------------------------------------------------
3x3 9 17.36ms 12.95ms 1.34x 1.50x
5x5 25 31.88ms 13.35ms 2.39x 2.50x
7x7 49 57.09ms 14.38ms 3.97x 3.50x
9x9 81 94.84ms 16.11ms 5.89x 4.50x
11x11 121 148.28ms 16.36ms 9.06x 5.50x
======================================================================
Completed Successfully!
======================================================================
3. Memory Access Patterns
While separable convolution does fewer operations, it requires two passes over the data. This can affect cache performance, though it’s usually still faster overall.
Best Practices
When to Use Separable Convolution
- Gaussian blur (always separable)
- Large kernel sizes (>7×7)
- Performance-critical applications
- Real-time processing
When Full 2D Might Be Acceptable
- Very small kernels (3×3)
- Non-separable filters
- Prototyping and testing
- When code simplicity is paramount
Modern Library Implementations
Most modern image processing libraries use separable convolution for Gaussian blur:
OpenCV
import cv2
# Uses separable convolution internally
blurred = cv2.GaussianBlur(image, (kernel_size, kernel_size), sigma)
scikit-image
from skimage import filters
# Also uses separable implementation
blurred = filters.gaussian(image, sigma=sigma)
scipy
from scipy.ndimage import gaussian_filter
# Implements separable Gaussian
blurred = gaussian_filter(image, sigma=sigma)
Conclusion
Separable convolution is a elegant example of how mathematical insight can lead to dramatic performance improvements. By recognizing that the 2D Gaussian kernel can be decomposed into two 1D operations, we achieve speedups that scale linearly with kernel size—from 2.5× for a 5×5 kernel to over 10× for a 21×21 kernel.
The key takeaways:
- Separable convolution is mathematically equivalent to full 2D convolution for Gaussian blur
- Performance gains increase with kernel size (K/2 speedup factor)
- Most production libraries use separable implementation for Gaussian operations
- The technique only applies to separable kernels, not all filters
For Gaussian blur specifically, there’s almost no reason to use full 2D convolution in production code. The separable approach is faster, uses less memory, and produces identical results.
Further Reading
- Separable Filters - Wikipedia
- Digital Image Processing by Gonzalez & Woods
- Computer Vision: Algorithms and Applications by Szeliski
For Medium readers, have you encountered other separable kernels in your work? Share your experiences in the comments below!